






Description
Abstract – Cell Phone Controlled Robo car
1. Introduction
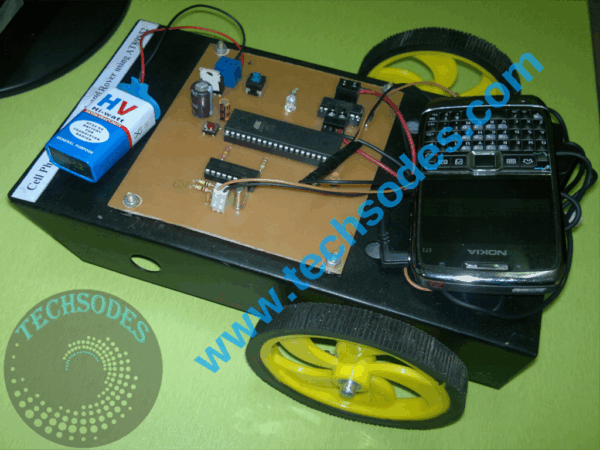
The Cell Phone Controlled Land Rover using an 8051 microcontroller is a modern robotics application designed to operate a mobile robotic platform through the use of standard GSM mobile phones. This system allows the user to control the movements and functions of the rover simply by pressing keys on their mobile device, which acts as a remote control, without the constraints of short-range wireless modules such as RF (Radio Frequency) circuits. The primary advantage of this project lies in its virtually unlimited operational range, restricted only by the coverage of the cellular service provider.
The concept focuses on overcoming the limitations of traditional remote-controlled robots, where RF modules typically have a working range of a few meters to a few hundred meters, and signal interference from nearby devices can cause unreliable operation. By utilizing a mobile communication system, the rover can be controlled from any location worldwide as long as there is GSM coverage, without interference from other wireless controllers.
This approach uses Dual Tone Multi-Frequency (DTMF) technology to send control commands from the operator?s phone to the microcontroller-based control system on the rover. The system offers up to twelve unique commands using standard mobile keypad inputs, allowing the rover to move forward, backward, left, right, and stop, as well as execute additional functions if programmed. The integration of a simple, low-cost 8051-based microcontroller with a DTMF decoder IC makes the system robust, affordable, and easy to implement for robotics enthusiasts and industrial applications.
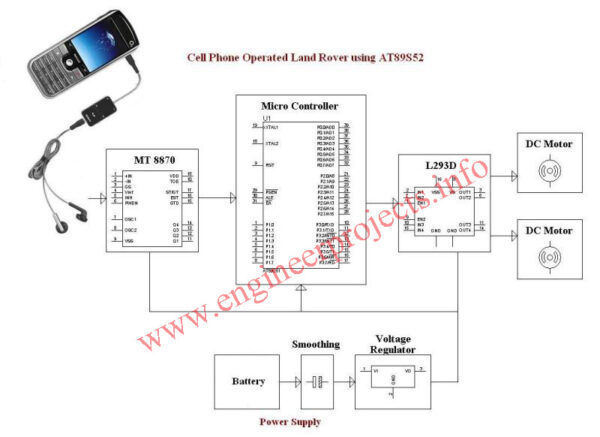
2. System Overview
The cell phone controlled land rover is composed of two main subsystems:
- The control interface ? the user?s mobile phone (referred to as MB1) which sends DTMF commands.
- The rover?s onboard control system ? which includes another mobile phone (MB2) mounted on the rover, connected to the DTMF decoder circuit and the microcontroller unit.
The control sequence is as follows:
- Initiating Communication:
The user (operator) initiates a call from their mobile phone (MB1) to the mobile phone mounted on the rover (MB2). - Receiving Commands:
The phone on the rover automatically answers the call (this can be achieved through auto-answer settings). Any key pressed on the operator?s phone generates a corresponding DTMF tone which is transmitted through the GSM network and received by the rover?s phone via its audio output (headphone jack). - DTMF Decoding:
The DTMF tones are sent to the MT8870 DTMF decoder IC, which converts these analog tone signals into 4-bit digital codes representing the specific key pressed on the user?s phone. - Microcontroller Processing:
The 4-bit data from the DTMF decoder is sent to the 8051 microcontroller, which compares it against predefined command mappings stored in its program memory. - Motor Driver Control:
Based on the decoded command, the microcontroller sends control signals to the L293D motor driver IC, which drives the rover?s DC motors to perform the desired movement (forward, backward, left, right, or stop).
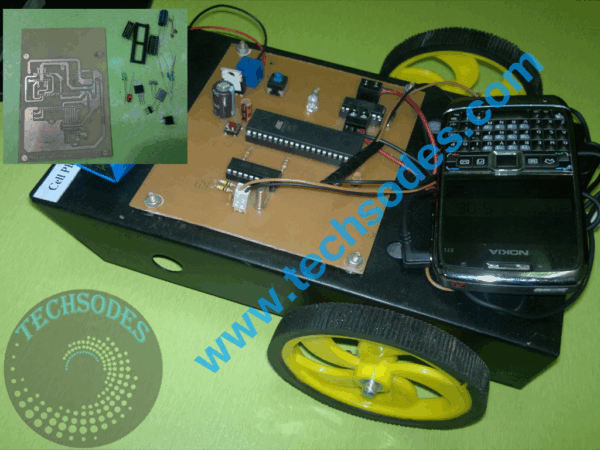
3. Hardware Components
The main hardware elements used in the system are:
- W78E052/AT89S52 (8051 family) Microcontroller ? Acts as the central control unit, processing incoming DTMF commands and generating appropriate control outputs for the motor driver.
- MT8870 DTMF Decoder IC ? Decodes incoming tone signals into 4-bit digital outputs.
- L293D Motor Driver IC ? Drives the rover?s DC motors in both directions.
- Two DC Geared Motors ? Provide propulsion and steering control for the rover.
- Two GSM Mobile Phones (MB1 & MB2) ? MB1 for control, MB2 mounted on rover for receiving commands.
- Power Supply ? A rechargeable battery pack to power the microcontroller, motor driver, and motors.
- Chassis and Wheels ? Mechanical body of the rover.
- Miscellaneous Components ? Wires, connectors, and support electronics for stable operation.
4. Working Principle in Detail
The DTMF (Dual Tone Multi-Frequency) signaling system is at the core of this project?s operation. Each key pressed on a mobile phone generates a combination of two distinct frequencies ? one from a low-frequency group and one from a high-frequency group. The MT8870 chip detects these tone pairs and outputs a binary code corresponding to the pressed key.
For example:
| Key Pressed | DTMF Output (Binary) | Rover Action |
|---|---|---|
| 2 | 0010 | Move Forward |
| 8 | 1000 | Move Backward |
| 4 | 0100 | Turn Left |
| 6 | 0110 | Turn Right |
| 5 | 0101 | Stop |
This mapping can be modified in the microcontroller?s firmware to accommodate additional commands like controlling a robotic arm, triggering sensors, or activating a camera.
The L293D motor driver receives control signals from the microcontroller and allows bi-directional control of the DC motors. For example, to move forward, both motors are driven in the same direction; to turn left, one motor is stopped while the other runs forward; to reverse, both motors are driven in the opposite direction.
5. Advantages of the System
- Unlimited Control Range
The control range is as wide as the GSM coverage area, meaning the rover can be operated from thousands of kilometers away. - No Interference
Unlike RF-controlled robots, this system does not face interference from nearby devices operating on similar frequencies. - Scalable Control Options
With up to twelve DTMF commands available, more functions can be added such as activating lights, sensors, or cameras. - Video Monitoring Capability
If the mounted phone supports video calling, real-time video feedback from the rover can be sent to the operator. - Cost-Effective
Utilizes widely available and inexpensive components like old mobile phones, basic microcontrollers, and standard ICs. - Secure Control
Only authorized users with access to the rover?s phone number can control the device.
6. Limitations
- Mobile Battery Dependency
The rover?s phone battery must be kept charged for continuous operation. - Network Dependency
Operation is dependent on GSM network coverage and quality. - Call Cost
Continuous operation can lead to higher mobile bills due to call charges. - Latency
There may be a slight delay in command execution due to network processing times.
7. Applications
- Surveillance and Security ? Can be equipped with a camera for monitoring remote locations.
- Search and Rescue Operations ? Operable in disaster-hit areas without needing to be nearby.
- Industrial Inspection ? Can be used to check hazardous or hard-to-reach zones in factories.
- Military Use ? Potential for reconnaissance missions without risking human lives.
- Educational Projects ? Demonstrates integration of telecommunication with embedded systems.
8. Future Enhancements
- Integration with GPS ? For real-time location tracking of the rover.
- Autonomous Features ? Adding sensors for obstacle detection and autonomous navigation.
- Voice Command Integration ? Allowing control via spoken commands transmitted over the call.
- Solar Charging ? To extend operation time without frequent battery recharging.
- Smartphone App Control ? Replacing keypad commands with a graphical control interface.
9. Conclusion
The Cell Phone Controlled Land Rover using 8051 microcontroller effectively demonstrates the integration of telecommunication technology with robotics. By using the GSM network and DTMF decoding, it overcomes the range and interference limitations of traditional wireless robots. The project provides a cost-effective, secure, and scalable solution for long-range robotic control, making it suitable for both educational purposes and practical field applications such as security, surveillance, and remote monitoring.
Its simplicity in design, coupled with its robust functionality, makes it an excellent choice for real-world implementation where range, reliability, and ease of use are key priorities.



Reviews
There are no reviews yet.